2022年11月2日,胡海岩教授学术团队开展第二次大组学术交流活动,活动由北京理工大学博士生王帅主持,北京理工大学博士生王坤、谷帅臻和南京航空航天大学博士生杨书吉分别做学术报告,胡海岩院士对报告作出点评并给出指导意见,一百余位课题组师生再次参与此次交流报告。
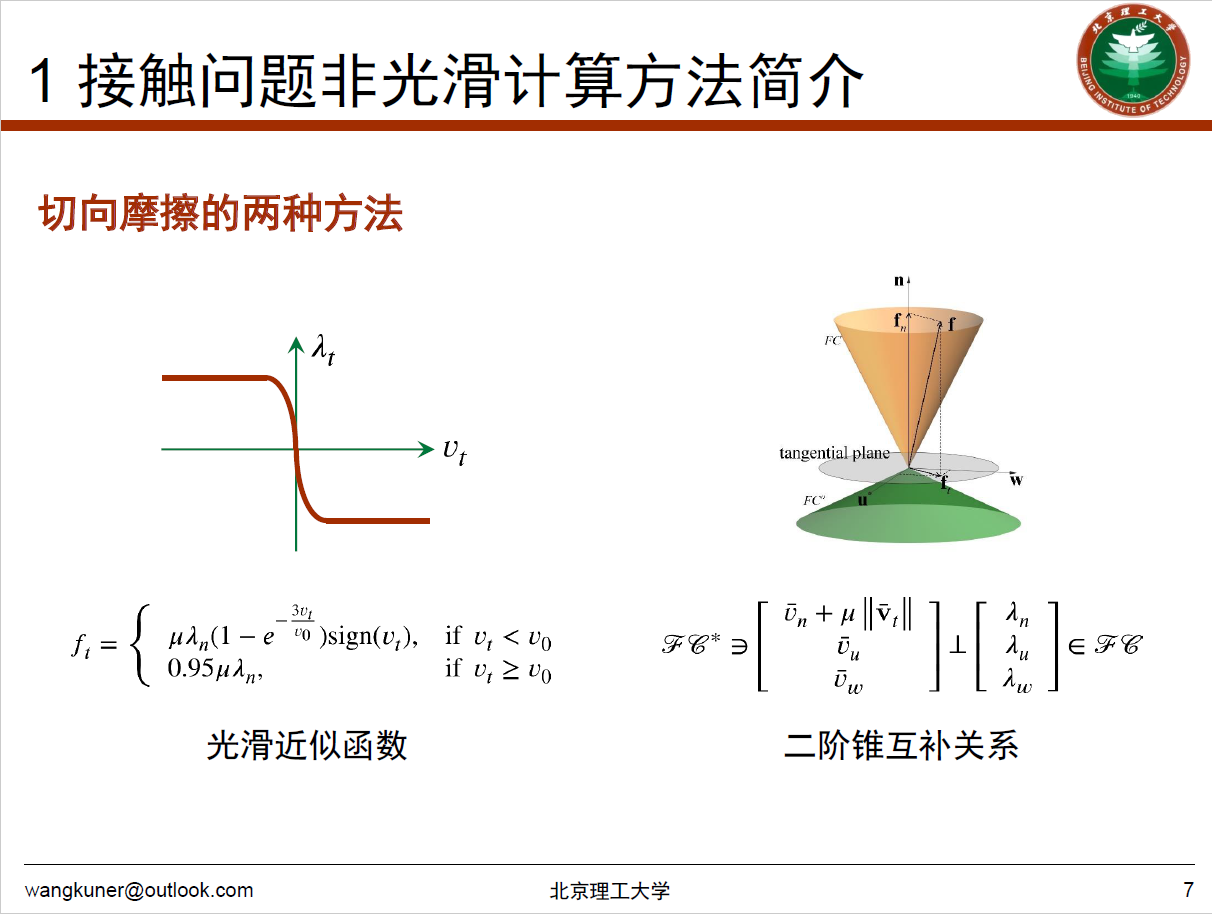
博士生王坤本次报告主要介绍了用于求解三维摩擦接触问题的非光滑动力学方法。他首先介绍了基于锥互补理论的空间多点摩擦接触问题建模方法,以及用于求解多体系统动力学方程的非光滑广义a积分算法,并进一步介绍了三维大变形柔体面面接触问题的非光滑计算方法。最后通过数值仿真,验证了所提出的算法可有效解决三维多体系统摩擦接触问题。
博士生谷帅臻本次报告介绍了一种隐式异步变分积分算法,该算法可以对不同尺寸的单元采用不同的时间步长进行积分,从而提高计算效率。此外,该算法具有保辛、保动量和近似保能量等良好性质。报告给出了算法的详细推导公式并给出其计算流程图,并通过一系列数值算例与传统积分算法进行对比,验证了该算法的精度、效率、保动量和保能量性质。
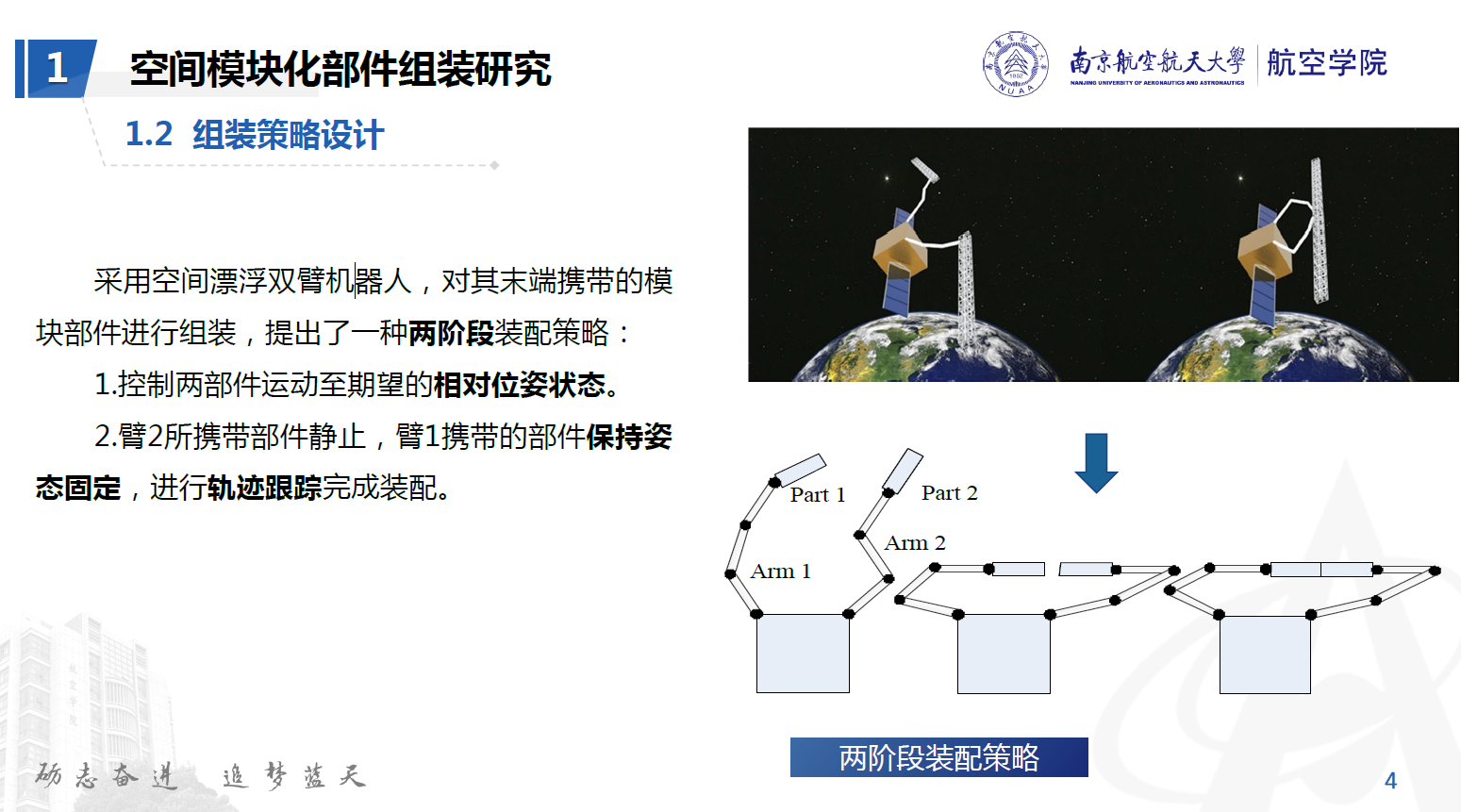
博士生杨书吉本次报告以在轨组装为背景,研究了空间双臂机器人进行模块部件组装的问题,基于双臂机器人的运动学模型与其末端的广义相对雅可比矩阵,提出了一种由大范围运动与轨迹跟踪组成的两阶段组装策略,并采用数值仿真与地面实验进行验证。他还研究了依附于空间柔性结构上的双臂机器人在执行抓捕任务时的运动控制问题,将柔性结构与机器人等效为弹簧阻尼系统,利用双臂与基体间的耦合作用力消除柔性结构的振动,在执行抓捕任务时,将一臂作为抓捕臂,另一臂作为平衡臂抵消抓捕臂对基体产生的耦合力,交替控制,从而完成双臂抓捕,最终通过数值仿真对其进行验证。

主持人简介:
王帅,男,1995年1月生,北京理工大学博士生,导师为胡海岩院士和田强教授。主要从事计算多体系统动力学、空间结构在轨自组装实验研究。
王坤,男,1994年12月生,北京理工大学博士生(硕博连读),导师为田强教授。主要从事非光滑多体系统动力学数值仿真研究。
谷帅臻,男,1997年4月生,北京理工大学博士生(本科直博),导师为田强教授。主要从事多体系统动力学高效数值仿真算法研究。
杨书吉,男,1993年6月生,南京航空航天大学博士生,导师为金栋平教授和文浩教授。主要从事空间机器人动力学与控制研究。




