Distributed active vibration cooperative control for flexible structure with multiple autonomous substructure model
Xiangdong Liu, Haikuo Liu, Changkun Du, Pingli Lu, Dongping Jin, Fushou Liu
Abstract: The objective of this work was to suppress the vibration of flexible structures by using a distributed cooperative control scheme with decentralized sensors and actuators. For the application of the distributed cooperative control strategy, we first propose the multiple autonomous substructure models for flexible structures. Each autonomous substructure is equipped with its own sensor, actuator, and controller, and they all have computation and communication capabilities. The primary focus of this investigation was to illustrate the use of a distributed cooperative protocol to enable vibration control. Based on the proposed models, we design two novel active vibration control strategies, both of which are implemented in a distributed manner under a communication network. The distributed controllers can effectively suppress the vibration of flexible structures, and a certain degree of interaction cooperation will improve the performance of the vibration suppression. The stability of flexible systems is analyzed by the Lyapunov theory. Finally, numerical examples of a cantilever beam structure demonstrate the effectiveness of the proposed methods.
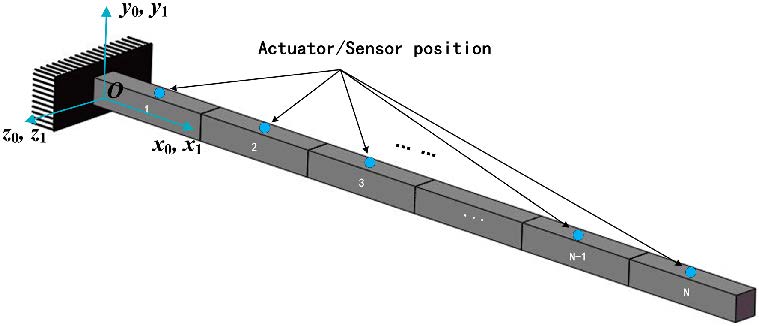
Multiple autonomous substructure models of the flexible beam
原文链接:https://journals.sagepub.com/doi/abs/10.1177/1077546320909968




