如何在太空搭积木?
——《空间结构在轨自主组装的动态控制与地面实验》科普介绍
近期,由胡海岩教授团队完成的国家自然科学基金重点项目“空间结构在轨自主组装的动态控制与地面实验”通过结题验收,被评价为全优。记者听说这个项目是在太空搭积木,带着一份好奇心采访了胡海岩教授。
记 者:您团队的这项研究是在太空搭积木吗,搭积木的目的是什么呢?
胡海岩:我们的研究可以理解为在太空搭积木,并用搭积木的方式来建造大型航天结构。以图1中的卫星为例,它具有两个黄色大型天线。由于天线尺寸达到了几十米,无法采用现有的折叠发射、入轨展开技术来实现。因此,人们设想将这样的大型空间结构分解为许多结构模块,也就是图中的六边形模块。如果将这样的结构模块视为玩具积木,那么在卫星进入轨道后构建大型天线,就是在太空搭积木。当然,这样的积木比玩具积木要大许多,它的边长可以达到几米,甚至十几米。当模块边长超过五米量级时,就需要靠在轨展开来实现,因为我国运载火箭的直径不超过五米。
图1 大型卫星天线的模块化建造示意图
记 者:您将这种结构模块比喻为积木,那么在太空搭积木,除了积木尺寸大,还有什么困难?
胡海岩:搭玩具积木的特点是,自己动手,边想边搭,允许试错。但在太空搭积木,需要由空间机器人来完成,是高风险的航天任务,试错的成本太高。因此,在太空建造模块化的大型结构,必须事先规划如何用空间机器人进行模块运输与组装,对空间机器人所实施的模块组装过程进行充分的数值仿真和地面实验。
记 者:什么是模块运输与组装规划,您团队的研究进展是什么?
胡海岩:我们以图2为例来说明模块运输和组装。图中,待组装的结构模块位于左下方的初始位置,我们的任务是将结构模块运送到图中右上方,组装一个直线型空间结构。在模块运输过程中,需要绕过由三个灰色区表示的障碍物。运输规划就是设计如何用最小能耗、最短时间将结构模块运送到指定位置,而组装规划是设计这些模块的装配顺序。对于柔性结构模块,需要考虑其运输过程中的振动,而模块振动与模块大范围运动相互耦合,是非常复杂的动力学问题。
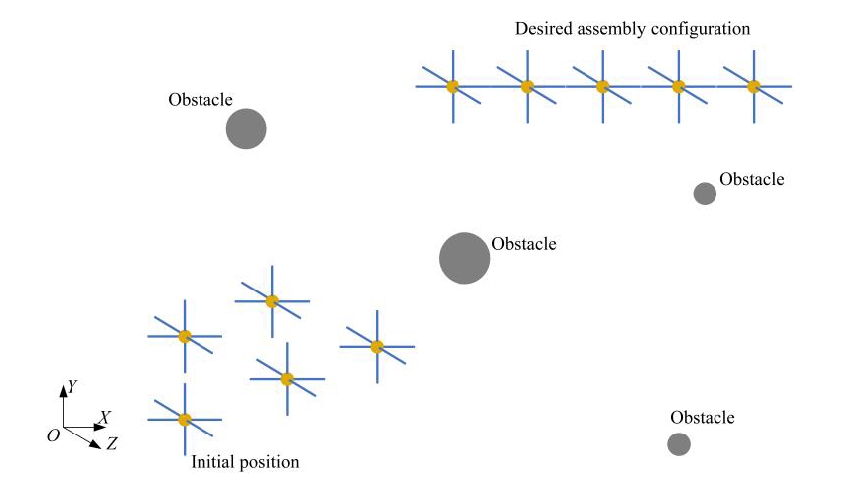
图2 多个结构模块运输与避障示意图
我们的主要研究进展如下:一是对于具有柔性变形的结构模块运输过程,提出一套高精度、高效率的多柔体系统动力学建模和计算方法,可对结构模块运输过程中大范围运动和变形的相互耦合进行数值仿真,精确和快速判断结构模块与障碍物的距离;二是在此基础上,提出了可有效避障、快速运输的运动规划与控制方法。在此过程中,解决了飞行机器人携带柔性结构模块的领航、跟踪、同步等动力学控制问题。
记 者:您刚才提到,太空搭积木要由空间机器人来完成,您团队在这方面的研究进展是什么?
胡海岩:我们主要研究飞行机器人运输和组装结构模块。现阶段的理论和方法研究针对三维空间飞行机器人,但地面实验验证主要限于二维。图3是我们研制的二维飞行机器人实验系统,该机器人具有两个柔性机械臂,机器人内部的气浮装置可使其在平面上通过喷气实现自由飞行。由图4可见,机器人的双机械臂可根据控制指令,抓取两个空间桁架模块,实现组装。

图3 双臂飞行机器人模拟器
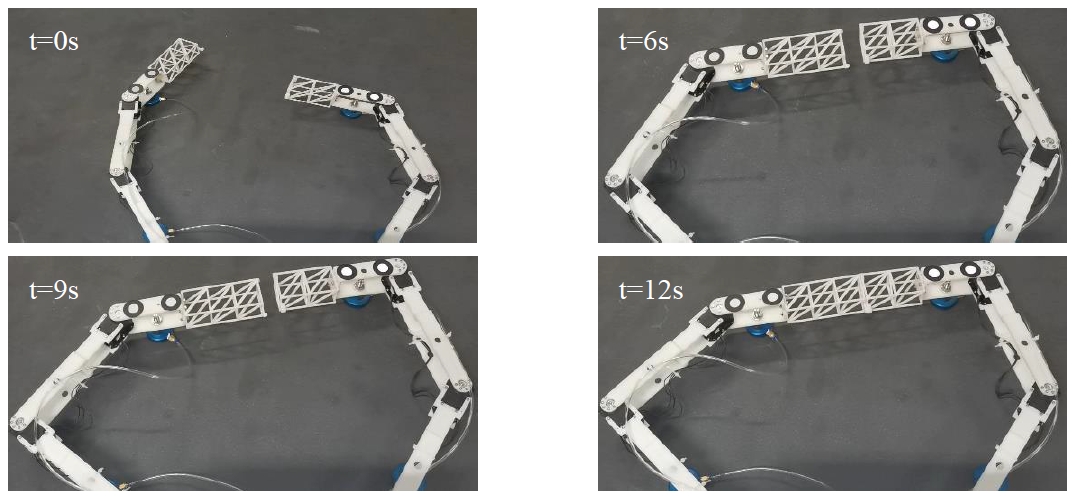
图4 双机械臂对两个结构模块进行组装的地面模拟实验
记 者:我见过工业机器人组成的汽车装配线,精细装配似乎属于高技术,您团队的研究进展如何?
胡海岩:由工业机器人进行装配确实是高技术,而空间装配更为困难,不能靠试错,必须基于数值仿真和最优控制。在装配过程中,机器人末端执行器与结构模块的相互碰撞、两个结构模块的相互碰撞,都是动力学仿真中的难题。
我们的进展包括两方面,一是建立两个物体在大范围运动中发生碰撞,尤其是摩擦碰撞、面-面碰撞的动力学仿真理论与方法。二是开展软抓取动力学研究,发明具有软抓取能力的机器人末端执行器。例如,图5是对具有面-面碰撞的软抓取过程进行动力学仿真的结果,展示了末端执行器抓取一个环形部件的过程。图6是新发明的双稳态软抓手,其原理如下:软抓手向下运动与物体接触后受压,经过屈曲翻转;通过摩擦力抓紧物体后,携带物体向上运动。图7展示了该软抓手对空间目标的动态捕获、拖曳对接和释放模拟实验。
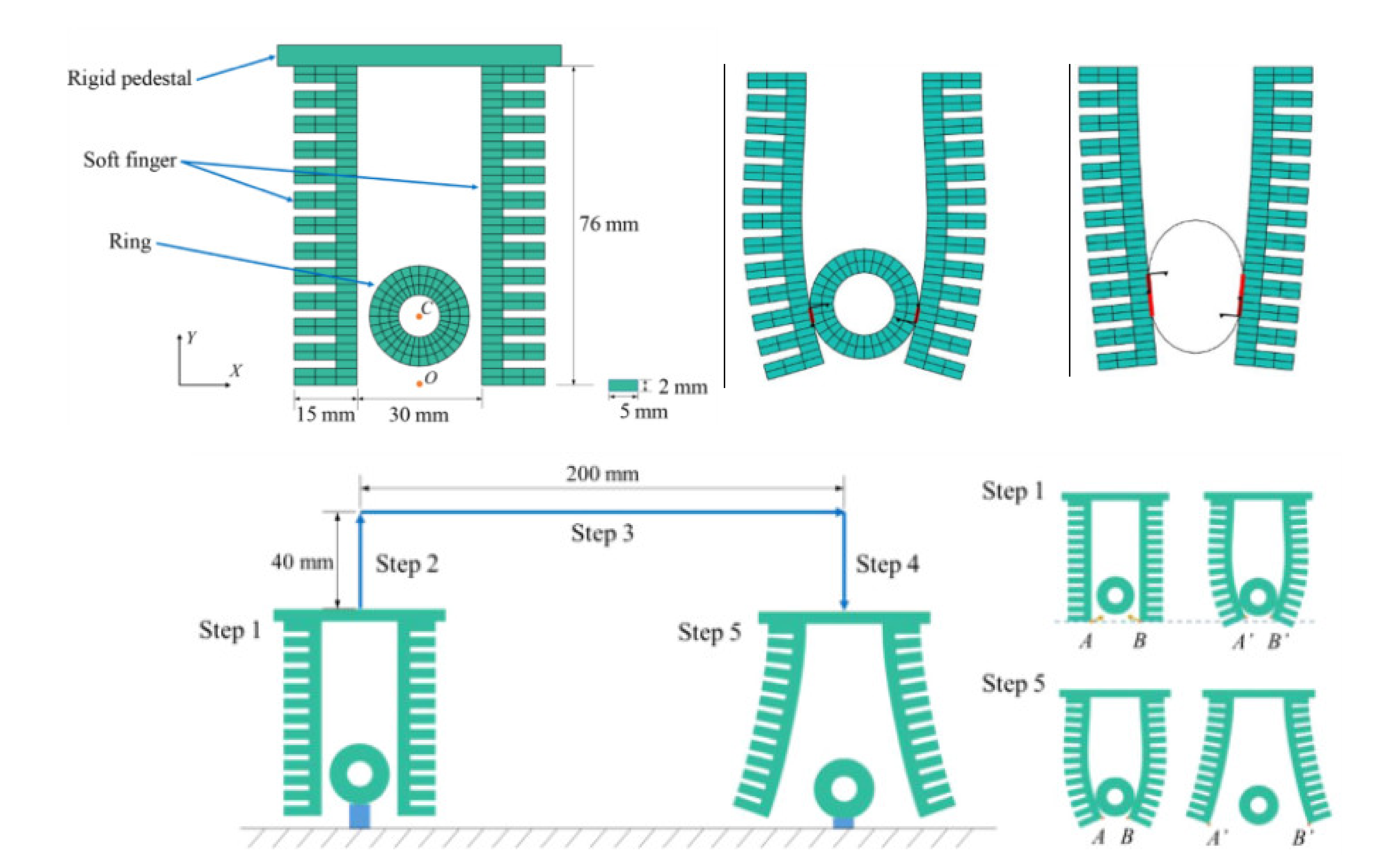
图5 机器人末端执行器抓取过程的动力学仿真
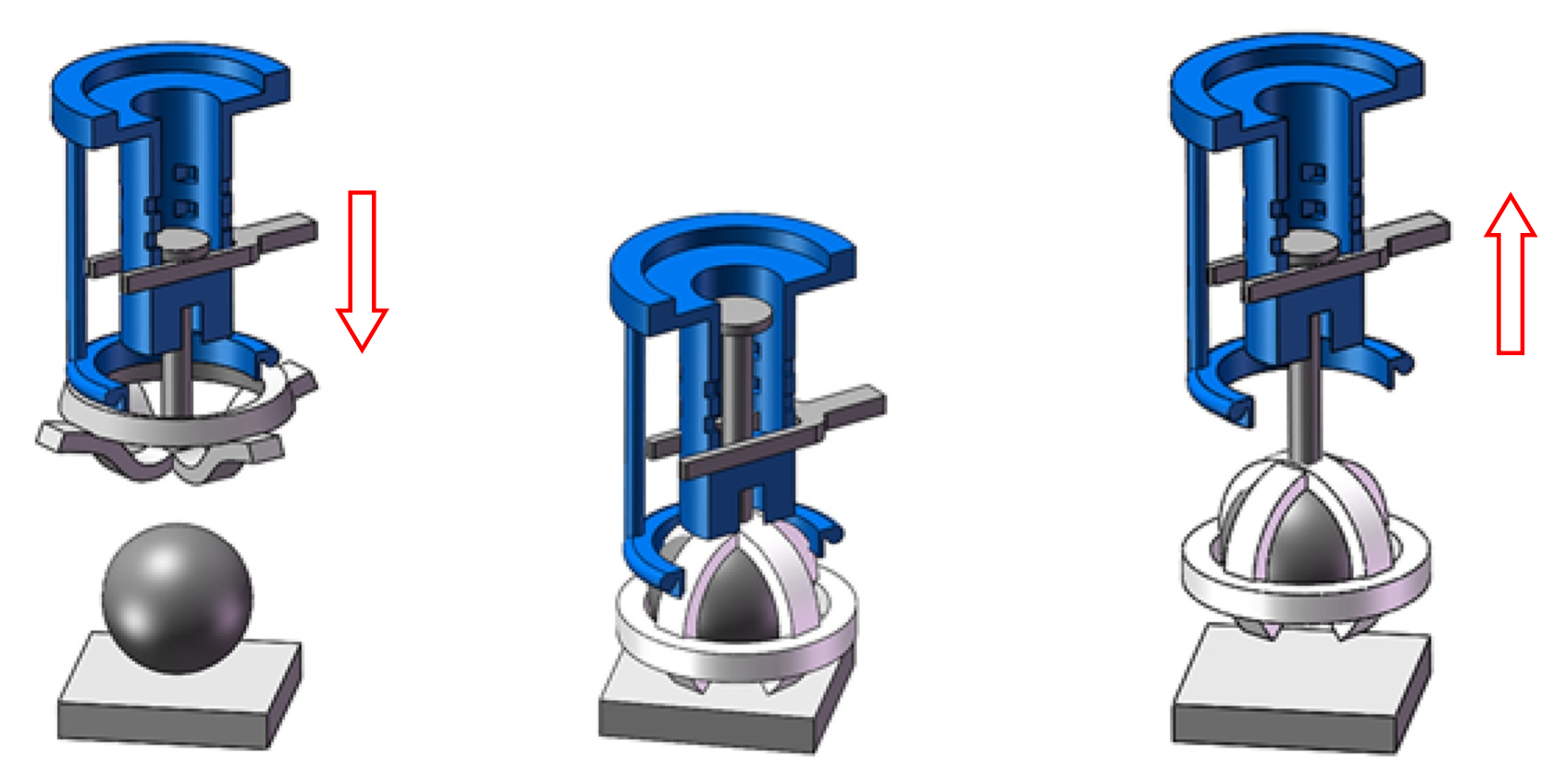
图6 双稳态软抓取机构示意图
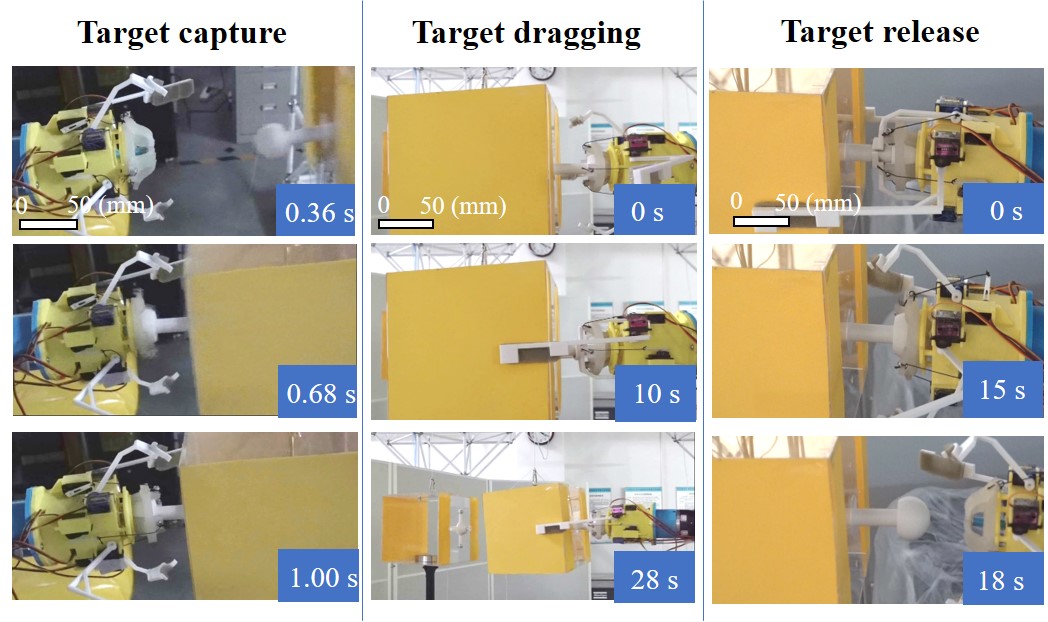
图7 软抓手对空间目标的动态捕获、拖曳对接和释放的地面模拟实验
记 者:您提到,在空间搭积木必须经过充分的事先规划和地面模拟,在地面如何模拟太空环境呢,比如微重力环境?
胡海岩:这是航天动力学领域的难题。在二维平面运动实验中,主要通过气浮力来抵消重力,形成微重力环境。例如,在图8所示的飞行机器人模拟器中装有气瓶(Gas cylinder),可通过喷气来抵消重力。图9是两个飞行机器人协同运送结构模块的地面模拟实验。对于图10所示的三维空间运动实验,我们发明了磁悬浮+重力补偿技术,使图中右上方的两个结构模块处于空间漂浮状态。
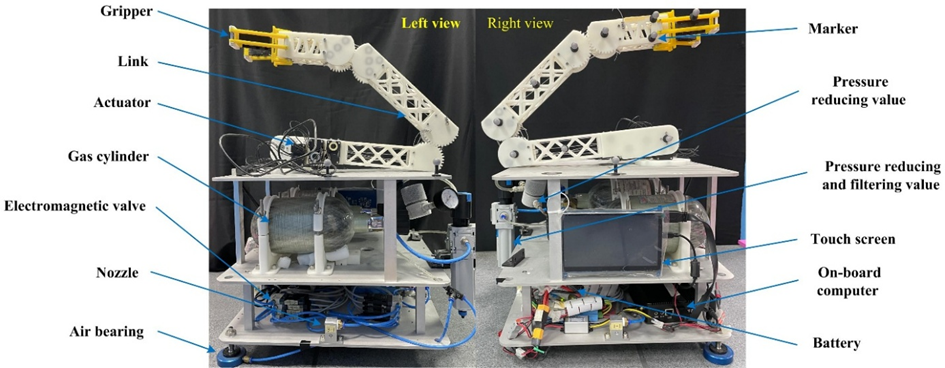
图8 带有软抓手与放大机构的空间机器人模拟器
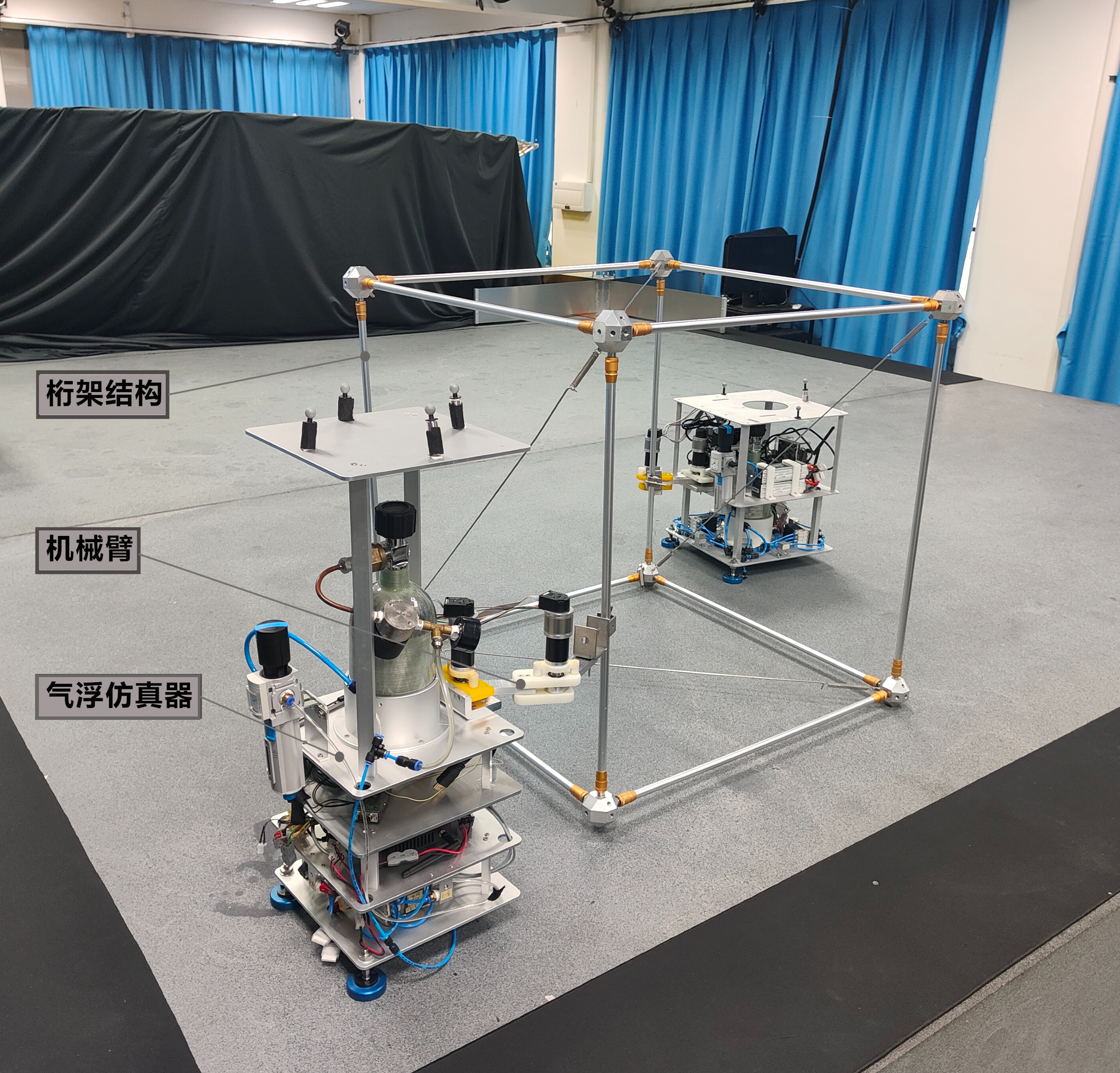
图9 两飞行机器人协同运输结构模块的地面模拟实验

图10 机械臂操控空间漂浮结构模块对接的地面模拟实验
记 者:在该项目成功结题之际,您对该领域的未来发展有何期待?
胡海岩:经过为期五年的研究,我国已具备在该领域再上新台阶的科学和技术积累。近期,我们正在论证百米级空间结构在轨组装技术研究。当然,这包含一系列富有挑战的科学和技术难题。我希望,今后有更多优秀青年学者投身于该领域的研究。




