柔性多体系统动力学与控制:主要研究航天结构的展开动力学建模与计算,航天结构的在轨组装和重构动力学与控制,绳系卫星系统的动力学与控制,软体机器人的动力学建模、分析与控制等。
Dynamics of flexible multibody systems mainly includes dynamic modeling and computation of large deployable space structures; dynamics and control of autonomous assembly of a space structure on orbit; dynamics and control of tethered satellite systems; dynamic modeling, analysis and control of soft machines; and so on.
❶
航天结构的展开动力学建模与计算
Dynamic Modeling and Computation of Large Deployable Space Structures
以国家重大航天科技工程需求为研究背景,主要研究空间结构(卫星天线、太阳翼、薄膜可展太阳帆与雷达、充气可展结构、柔性抓取机械臂、智能软体机器人、超大型空间组装结构等)的动力学建模、计算(图1、图2)与优化方法(图3);空间结构动特性控制方法;新型空间结构设计方法;仿生多体动力学及其在竞技体育、康复、医疗等领域的应用;开发动力学与控制软件(图4);研制地面动力学与控制实验平台(图5、图6)。
To meet the national demands of aerospace science and technology, the research team has proposed methodologies of precise dynamic modeling and efficient computation for deployable space structures, such as deployable antenna reflectors, solar panels, solar sails and mechanical arms, as shown in Figures 1 and 2. Dynamic topology optimization design of the deployable space structures has been studied to achieve better dynamic performance and lighter weight, as shown in Figure 3. A computational software for simulating the deployment of large space structures has been developed and successfully applied for several engineering cases in China, as shown in Figure 4. Furthermore, a ground validation platform for the deployment of space structures has been set up in the lab and experiments have been carried out based on optical measurement, as shown in Figures 5 and 6.
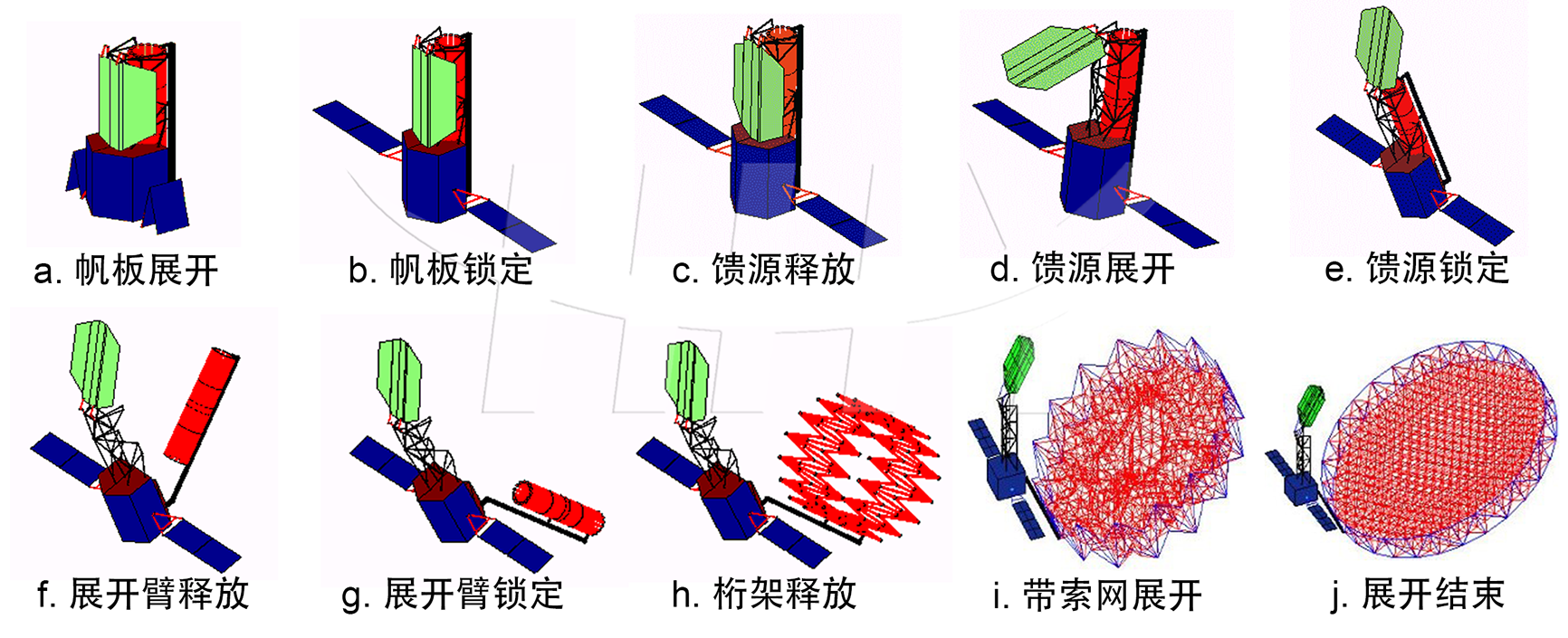
图1 卫星挠性附件展开过程的多柔体动力学模拟
Figure 1 Dynamic simulations of the deployment of an antenna reflector installed in a satellite
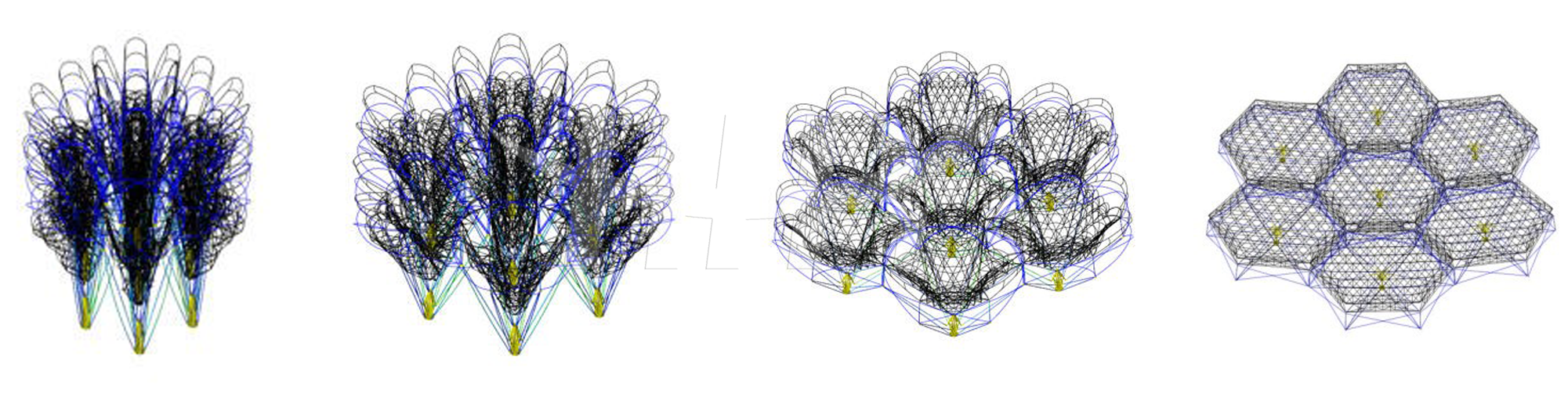
图2 卫星多模块天线展开过程的多柔体动力学模拟
Figure 2 Dynamic simulations of the deployment of a modular antenna installed in a satellite
|
|
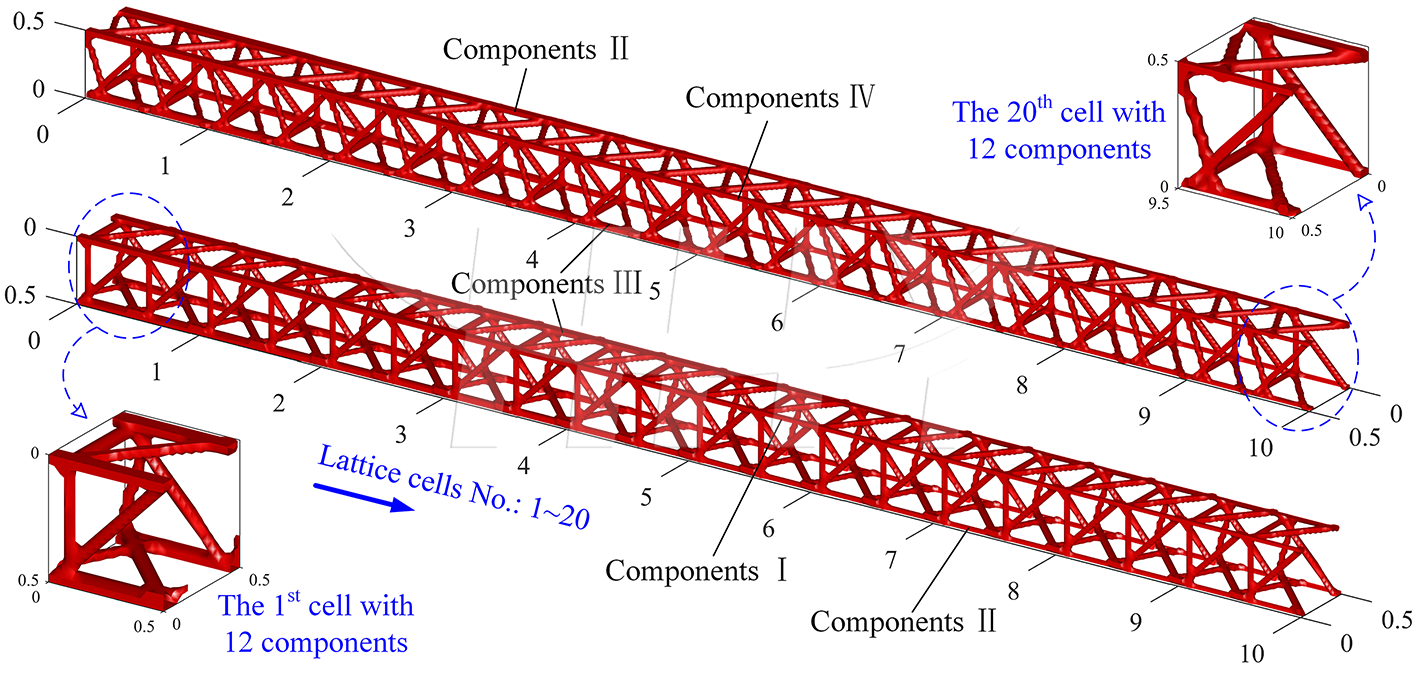
图3 空间伸展臂的结构拓扑优化
Figure 3 Topology optimization of the flexible extending arms
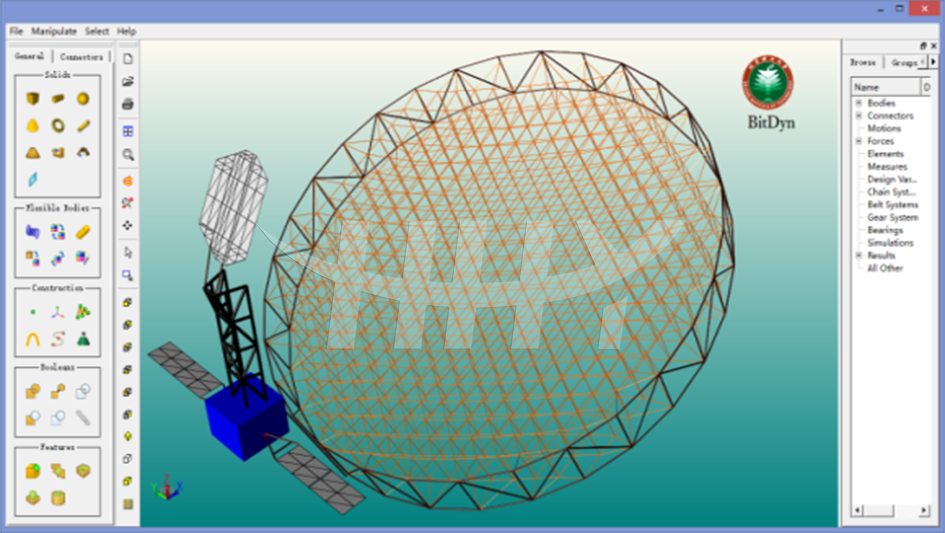
图4 空间结构系统动力学分析软件
Figure 4 A software for simulating the deployment of large space structures
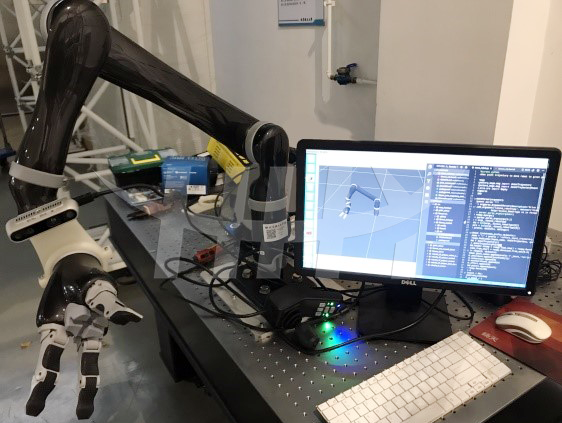
图5 空间自主抓取机械臂动力学与控制实验平台
Figure 5 Experiment platform for the autonomous space grasping robot arm

图6 天线反射器展开动力学地面实验平台
Figure 6 Experiment platform for the deployment of a hoop-truss reflector
❷
航天结构的在轨组装和重构动力学与控制
Dynamics and Control of Autonomous Assembly of a Space Structure on Orbit
在轨组装是一种在太空进行结构装配的技术,其独特的优势在于:一是相比于在轨展开技术,能够构建尺度更大的巨型空间结构,例如,大口径望远镜、大口径天线、巨型太阳能阵列、太阳光子推进帆等;二是便于根据任务变化进行结构重构;三是易于对故障组件进行替换。在轨组装可分为“有人参与”和“自主”组装两种类型。有人参与的在轨组装主要通过地面远程控制或航天员在轨操作完成。自主组装则是由专门的空间机器人自动完成部件的取运和装配,如图7所示;或是利用部件间的自主交会、对接实现系统组装,如图8所示。研究团队针对在轨自主组装动力学、控制及地面实验开展了深入研究。例如,针对超大型空间望远镜在轨组装任务涉及的模块化结构设计、无接触视觉测量以及机械臂控制等关键问题,通过地面模拟实验平台对自主组装策略进行了验证,如图9所示。再如,针对追踪航天器与自旋目标航天器的交会对接任务,基于势函数理论、前馈控制理论以及比例-微分控制理论,提出了分阶段控制策略,并通过地面实验系统进行实验验证,如图10所示。此外,针对飞行机器人携带柔性空间结构模块在轨自主组装任务,提出了多种控制策略:将飞行机器人及其携带的空间结构模块简化为二维刚体+柔性梁系统,提出将姿态一致性控制和避撞控制相结合的交会对接控制策略;又进一步提出了基于人工势能的交会对接控制策略,通过图11所示的地面物理仿真实验,验证了其有效性。
On-orbit assembly is a kind of technology for structural assembly in space. This technology has several unique advantages. Compared with the on-orbit deployment technology, the much more large space structure can be constructed, such as, the large aperture telescope, the large aperture antenna, the giant solar array, and the solar photon propulsion sail. In addition, the structural reconfiguration according to the mission requirements and the replacement for the faulty components become available. The on-orbit assembly technology can be divided into two categories, namely, human-assisted assembly and autonomous assembly. The human-assisted assembly is mainly accomplished through the remote control on the ground or the on-orbit operations by the astronauts. Autonomous assembly can be further separated into two types, one is the space robots automatically complete the capturing, transporting and assembling the structural modules, as shown in Figure 7, the other is utilizing the autonomous Rendezvous and Docking (RVD) among the structural components to fulfill the assembly task, as shown in Figure 8. Our research group has been committed to on-orbit autonomous assembly research with focus on dynamics, control, and ground experimental aspects. For the on-orbit assembly mission of the future extremely large space telescope, the key issues related to the modular structure design, the non-contact visual measurement, and the robotic arm control were studied, and the autonomous assembly strategy was further verified through ground-based experiment, as shown in Figure 9. For the planar RVD mission of a chaser spacecraft with a spinning target spacecraft, a multi-stage control strategy based on the artificial potential function method, the feedforward and proportional derivative control theory was proposed, and the effectiveness of the controller was validated by the ground experimental system, as shown in Figure 10. A variety of control strategies have been proposed for on-orbit autonomous assembly of flexible space structural modules carried by free-flying robots. For example, the free-flying robots with flexible modules were simplified as the two-dimensional hub-beam models, then an RVD control strategy which combines a state consensus controller and a collision avoidance controller was presented. In addition, an artificial potential function-based RVD controller was further proposed, and its effectiveness was verified through the ground experiment shown in Figure 11.
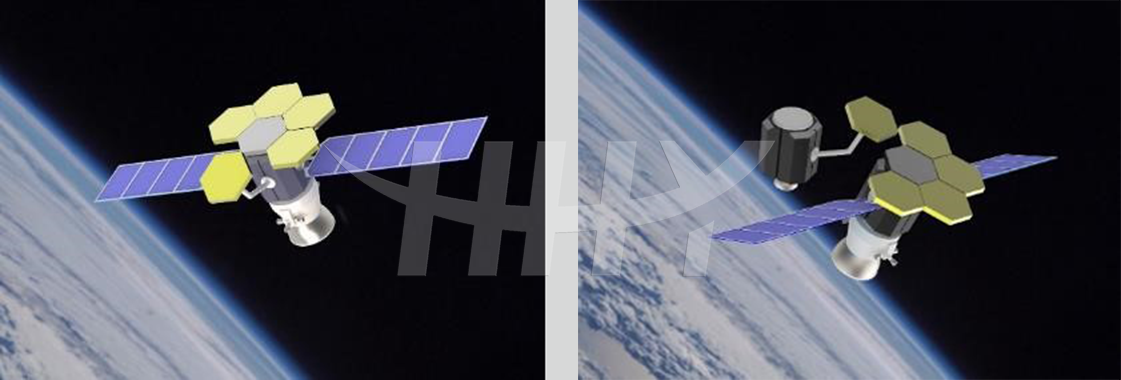
图7 空间机器人完成在轨自主组装示意图
Figure 7 The space robot-based on-orbit autonomous assembly

图8 利用部件间自主交会、对接完成在轨自主组装示意图
Figure 8 The autonomous RVD-based on-orbit autonomous assembly

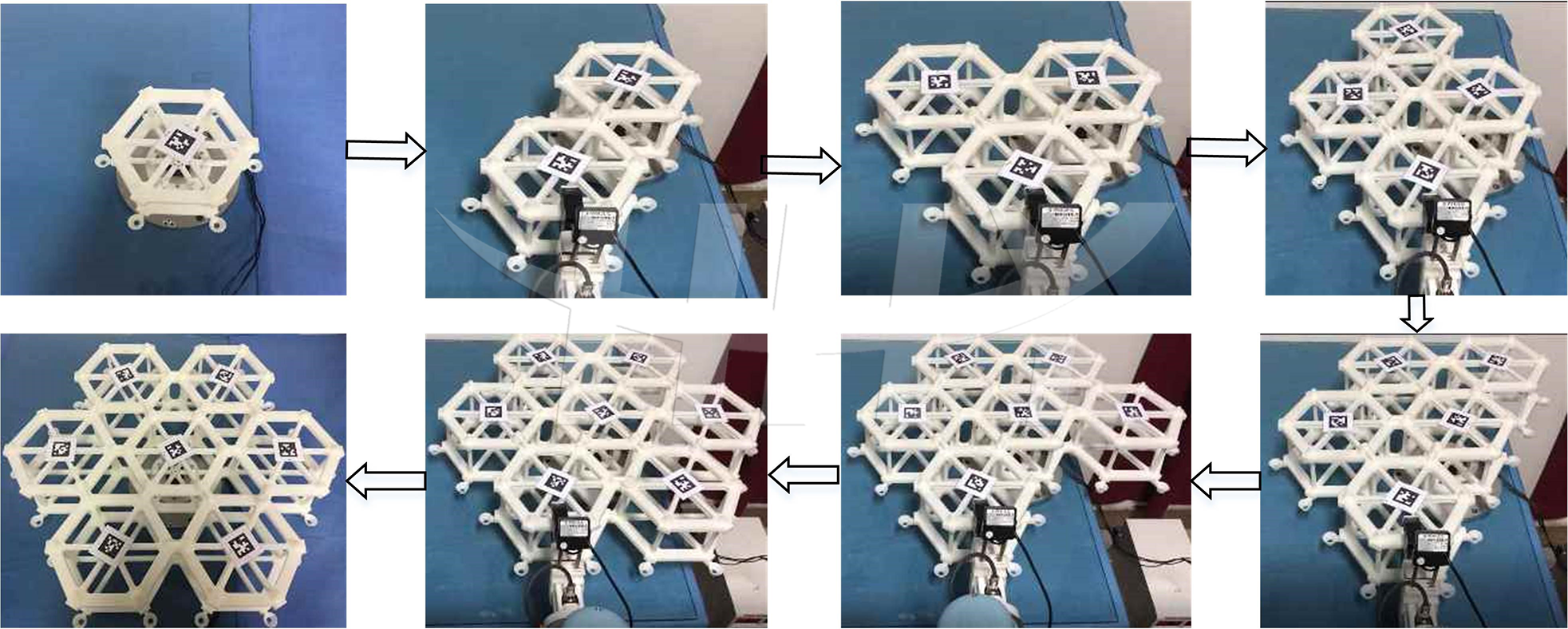
图9 固定基座机械臂进行结构模块组装的物理仿真实验过程
Figure 9 Autonomous assembly of structural modules using fixed-base robot


图10 两个航天器进行自主交会、对接的物理仿真实验过程
Figure 10 Experimental research on RVD mission of two spacecraft simulators
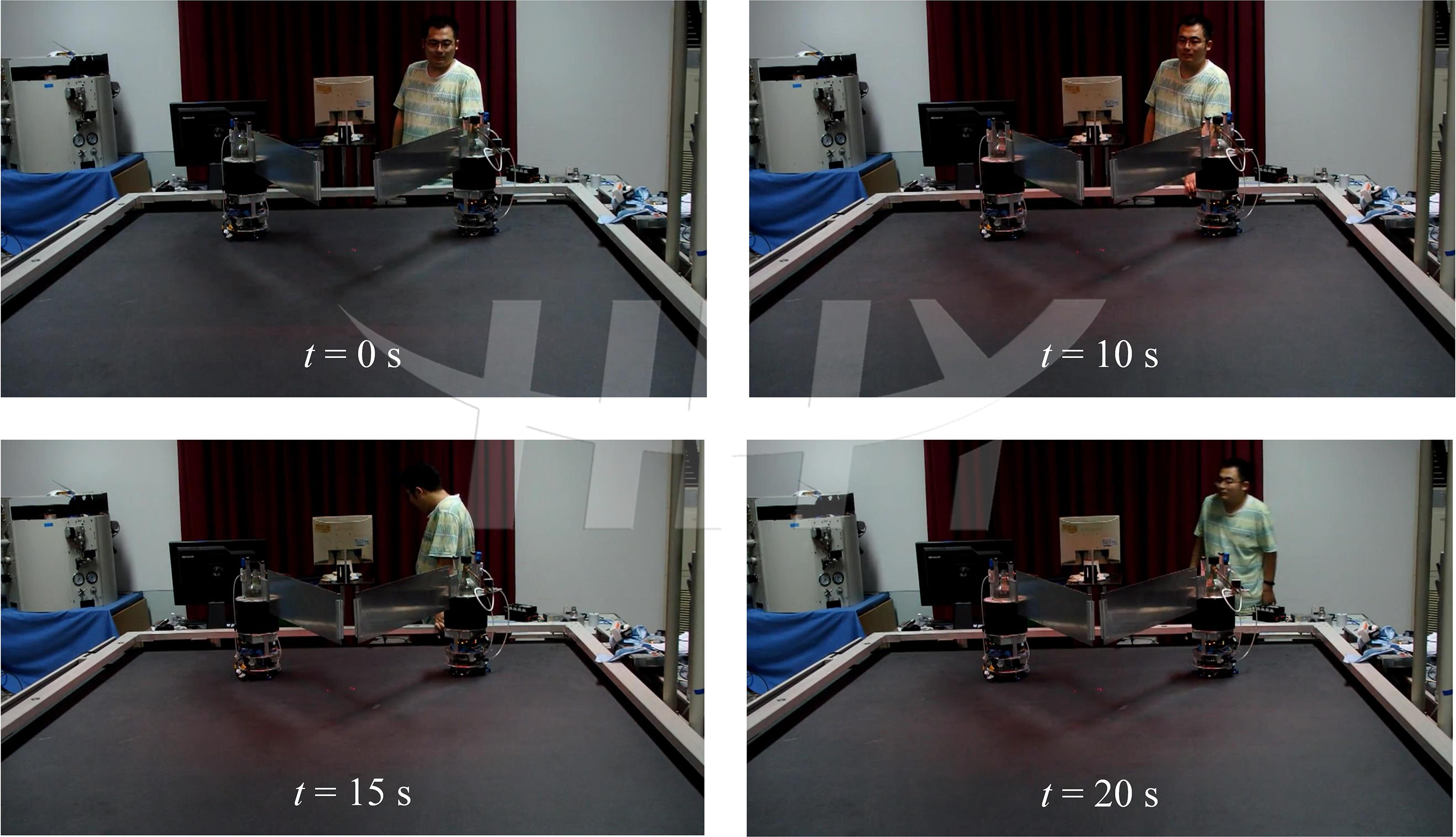
图11 两个航天器携带柔性结构模块进行自主交会的物理仿真实验过程
Figure 11 Experimental research on RVD mission of two spacecraft simulators carrying flexible structural modules
❸
绳系卫星系统的动力学与控制
Dynamics and Control of Tethered Satellite Systems
绳系卫星系统意指借助柔性系绳将两个或多个人造卫星连在一起飞行的组合体。这种系绳通常由高强度纤维或导电材料制成,长度可达几十公里。特别地,具有导电特性的空间系绳(通常称电动力系绳)在绕地飞行时会切割地磁场,并产生很大的动生电动势。电流在流过系绳时会与地磁场相互作用而产生Lorenz力,特别适合用于改变航天器轨道,或是太空垃圾的降轨及清理,如图12所示。基于电动力绳的离轨技术具有基本无需燃料、质量小、简单易用和低成本的优点,在众多空间碎片离轨技术中具有独特优势和经济价值。空间系绳的另一重要应用是通过系绳将多个卫星相连构成协同工作的绳系编队飞行系统,可用于对地观测、深空探测等科学任务,具有广阔的应用前景,如图13所示。基于合成孔径技术,将子孔径(光学、微波等观测器)安装在由系绳相连的编队卫星上构造超大孔径干涉仪,实现对目标的高分辨率成像。并且通过系绳卷绕实现孔径改变、队形保持,可大幅降低系统燃料消耗,提高在轨服务寿命。近二十年里,研究团队针对绳系航天器动力学、控制及实验问题开展了深入研究。图14所示是南京航空航天大学机械结构力学及控制国家重点实验室研制的绳系航天器地面实验系统。
Space tethers are long cables, made of long strands of high-strength fibers or conducting wires (up to tens of kilometers) used to connect two or more end-bodies in the space environment. Many applications proposed for space tethers can be encapsulated under the concept of Tethered Satellite System (or TSS for short), namely, two or more satellites (spacecrafts) connected by space tethers. In particular, a long conductive tether, usually referred to as electrodynamic tether, is able to generate a large electro-motive force along the length of the tether when it is orbiting around a planet with a magnetic field. The electric current flowing in the electrodynamic tether can interact with the magnetic field to generate Lorenz force, which can be applied to changing the orbits of spacecraft and to deorbiting and clearing space debris, as shown in Figure 12. Due to the advantages of no propellant, small mass, easiness in application and low cost, the deorbiting technology based on the electrodynamic tether has been identified as an appealing technology among various deorbiting technologies. Tethered formation flying is another promising application of space tether technology, that is, a cluster of tether-connected satellites is coordinated to perform various advanced missions, for example, such as earth observation and deep space exploration, as shown in Figure 13. Based on a synthetic aperture method, the sub-aperture (optical, microwave and other collectors) can be installed on the tethered satellites to construct an interferometer of a very large aperture, which can achieve the imaging for targets with a high resolution. Furthermore, the baseline change and maintenance of the formation configuration can be realized through the deployment and retrieval of tethers, which greatly benefits the increase of system service life and the reduction of fuel consumption. Our research group has been committed to TSS research for nearly 20 years, with focus on dynamics, control, and experimental aspects. Figure 14 shows the ground-based experimental system for TSS research at State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics.
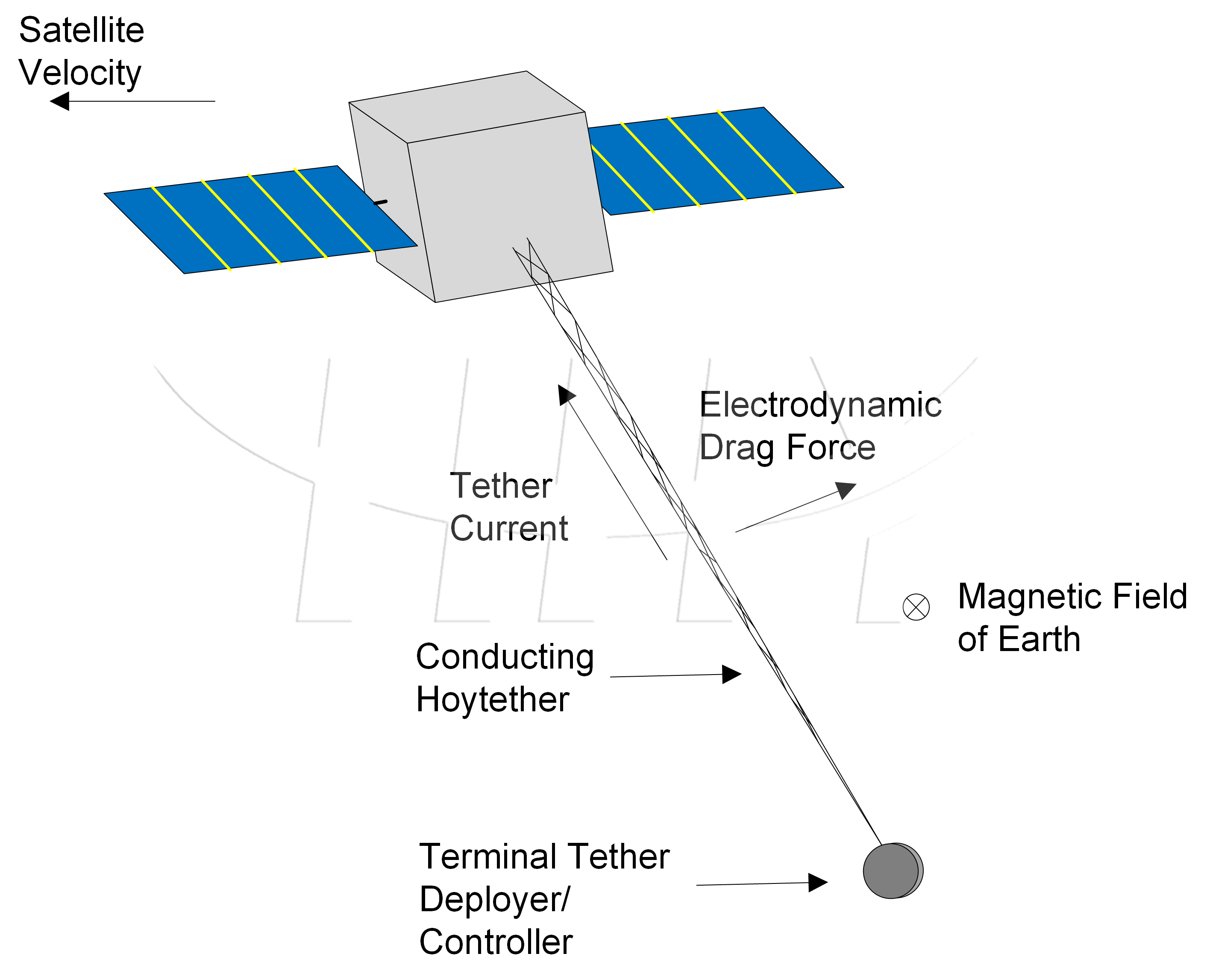
图12 电动力绳离轨技术
Figure 12 Deorbiting technology based on electrodynamic tethers

图13 绳系卫星编队空间观测技术
Figure 13 Space observation based on tethered formation flying
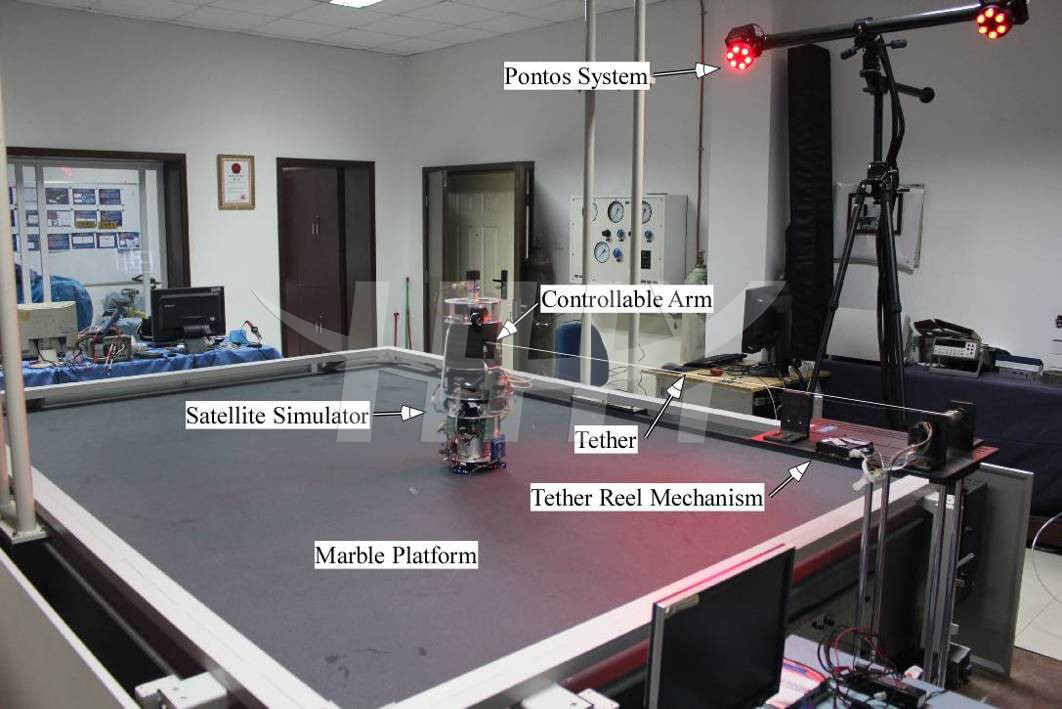
图14 绳系航天器地面实验系统
Figure 14 Ground-based experimental system for TSS research
❹
软体机器人的动力学建模、分析与控制
Dynamic Modeling, Analysis and Control of Soft Machines
以智能制造和航天器在轨服务等国家重大需求为研究背景,研究软机器系统动力学建模、分析与控制,发展响应型软材料与软结构的动力学建模方法(图15),设计新型软机器(图16),调控柔性结构变形与运动(图17),建立软体机器人动力学实验测试和仿真控制平台等。
Focusing on the intelligent manufacturing and in-orbit services of spacecrafts, the research team has been studying dynamic modeling, analysis and control of soft machine systems. It aims to develop dynamic modeling methods for compliant materials and structures (Figure 15), design novel soft machines (Figure 16), achieve motion and deformation control (Figure 17), and establish experimental testing and simulation control platforms for soft robots.
图15 智能材料驱动的结构折展过程和机器人爬行过程模拟
Figure 15 Simulation of the unfolding process of structures and the crawling process of robots driven by smart materials

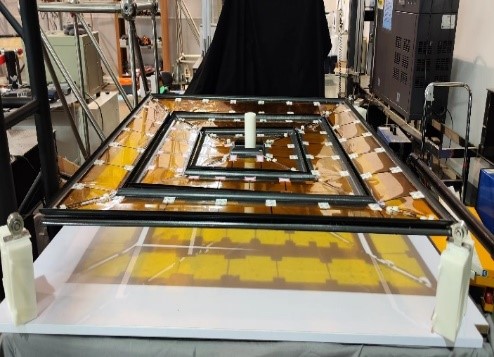
图16 软抓手、折展重构结构及薄膜结构等软机器动力学设计
Figure 16 Dynamic design of soft grippers, deployable reconfigurable structures, and membrane structures
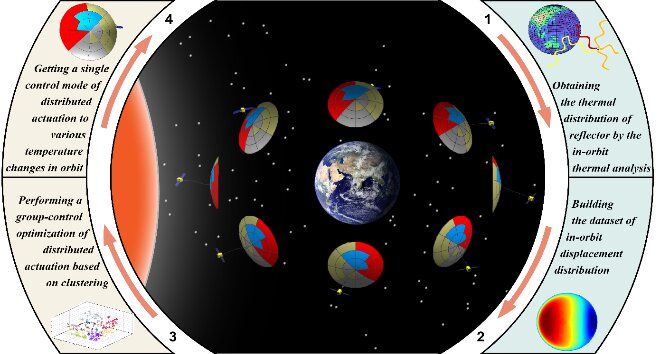
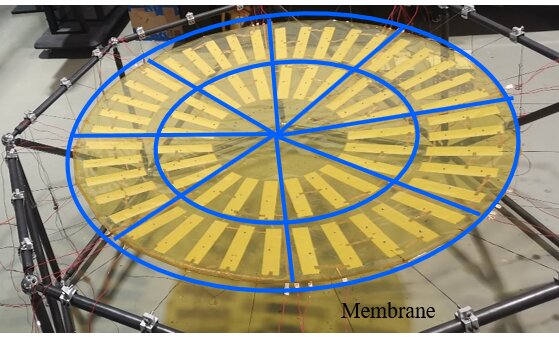
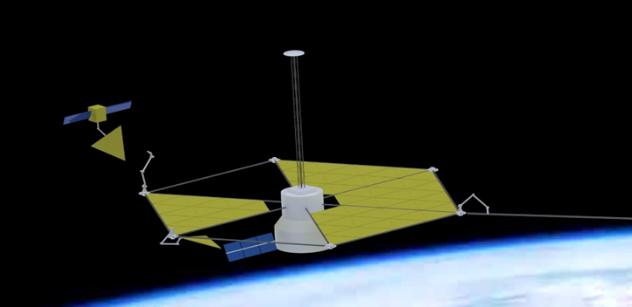
图17 柔性空间结构变形与运动控制
Figure 17 Deformation and motion control of flexible space structures




